


18DOF Muto RS Hexapod ROS2 Robot for Raspberry Pi and NVIDIA Jetson NANO (Jetson Version with Jetson NANO SUB Board)
(0
reviews)
Sold by:
New Era
New Era
Price:
$1,699.00
/0.2
Refund:
Share:
Top Selling Products
-

Gentleman Soldering Kit
$1,634.00 -
ELECFREAKS Raspberry Pi Pico Starter Kit
$1,650.00




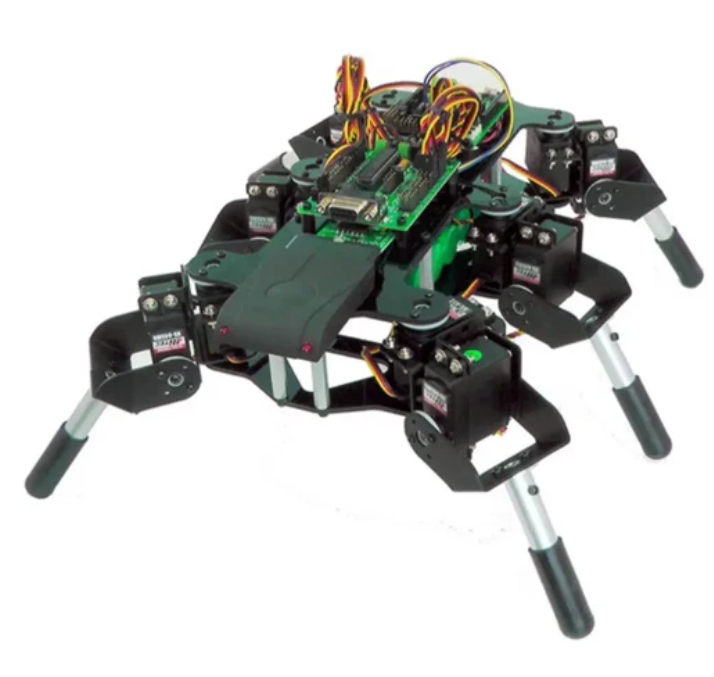
- It is compatible with Raspberry Pi and Jetson NANO, and this is the Jetson version with the Jetson B01 board.
It includes high-quality accessories such as 18PCS of 35KG metal bus servos, a depth camera, a LiDAR, a voice interaction module, and a large-capacity battery.
It is programmed in Python3, uses the ROS2 operating system, and applies inverse kinematics algorithms to precisely control the movement of the robot.
Yahboom provides a multifunctional remote control APP, a wireless controller, and a map navigation APP.
It supports RVIZ simulation, allowing users to control the robot and verify algorithms in a virtual environment.
Muto RS is a desktop-level bionic hexapod robot developed and designed based on the ROS2 operating system, which is compatible with both Jetson NANO and Raspberry Pi. The entire fuselage is made of aluminum alloy, and it contains 18PCS of 35KG serial bus servos, a depth camera, a LiDAR, and a voice module. Through Python3 programming and built-in high-precision algorithms, Muto RS can easily achieve AI visual interaction, 3D mapping and navigation, voice interaction, deep learning, and Rviz simulation. Based on multi-machine communication technology, we can also make Muto complete multi-machine synchronous control and multi-machine navigation. Users can control it through methods such as APP, wireless gamepad, and computer web pages. Muto is not only suitable for learning the algorithms of multi-legged bionic robot movement but also a good platform for ROS developers.
Related products







$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023