


Lynxmotion SES-V2 mechDOG quadruped base kit
(0
reviews)
Sold by:
Inhouse product
Inhouse product
Price:
$1,219.95
/0.9
Refund:
Share:
Top Selling Products
-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




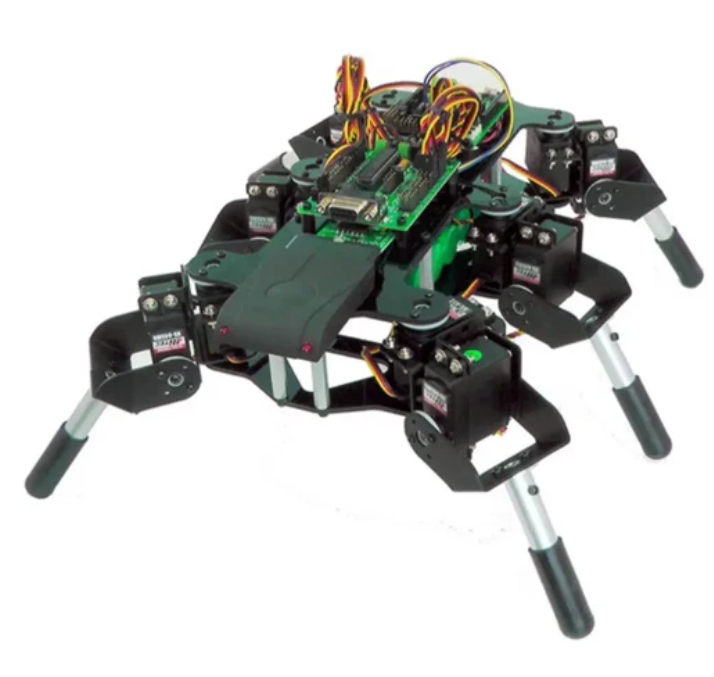
- Lynxmotion (LSS) - mechDOG Quadruped Base Kit
- 12DoF quadruped robot for development and experimentation
- Uses configurable and versatile Lynxmotion Smart Servos
- Frame components are made of durable aluminum and G10 composite materials
- Designed for adding sensors, Raspberry Pi, Arduino, and more
- Requires assembly, programming, and additional parts
- The Lynxmotion (LSS) - mechDOG Quadruped Base Kit is a collaboration between Lynxmotion and Mech-Dickel Robotics to create a quadrupedal robot "dog" with similar degrees of freedom to mammals. This mid-sized platform is designed to provide users with a smart servo-based platform for indoor development and experimentation.
- Lynxmotion ST1 modular smart servos are used throughout, along with various Lynxmotion Servo Uprighter Kit (SES) V2 mounts. The body panels are made of composite G10, with anodized aluminum body side panels. LSS adapters are used to distribute battery power to each leg and can be used with microcontrollers compatible with Arduino shields, single-board computers (SBCs) such as the Raspberry Pi, or even directly with a USB cable.
- The internal compartments can be quickly accessed using thumbscrews on the top and bottom. There are mounting points on the top for accessories such as the RPLidar-A1 360-degree laser scanner. The size of the robot and the built-in functionality of the smart servos make it an ideal, inexpensive development platform on which to mount a variety of sensors and use them for autonomous behavior, navigation, and more.
- Combined with Lynxmotion's smart servos (rather than the 9g small RC servos or BLDC motors typically used for small desktop quadrupeds or large quadrupeds), developers can effectively control and feedback the servos. Possible configurations for each servo include angle range, center position, direction, speed, LED color, operation mode (serial vs. RC), and more. Feedback for each servo (serial mode) includes, but is not limited to: absolute angle positioning, voltage, current, speed, temperature, servo motor status. The servo motors use a "human readable" communication protocol, so they are very easy to use and understand. Arduino, Python, and ROS libraries are available for the servo motors.
- The mechDOG base kit is designed to allow customers to add their own electronics, such as a microcontroller or single-board computer. Arduino-compatible example motion code with RC inputs is available, which customers can modify to suit their needs, but as a quadruped development platform, customers will need to program the robot to suit their needs and applications.
- Features
- Each leg has 3 degrees of freedom (DoF): hip; shoulder; knee
- Fully configurable smart servo motors with multiple feedback parameters
- Modular aluminum bracket and G10 body plate
- Mounting plate for: Parallax Ping ultrasonic sensor; Sharp GP2D infrared sensor; SES V2 bracket; LSS servo
- Mounting holes for Lynxmotion BotBoarduino, Arduino UNO, Lynxmotion LSS-2IO, and Raspberry Pi
Related products








$149.99
Ainova Vision Robotic Car with Wondercam, Graphic Scratch and Python Programming
Club Point:
0
© Temu-2023